
Analiza Danych Paramotor XC
Odkryj 1684 strefy startowe PPG na całym świecie. 11 lat danych Xcontest PPG — gdzie piloci latają XC na parametrze. Pokazywane są tylko miejsca z ≥ 2 lotami ≥ 100 punktów XContest.
Problemy z drganiami, niestabilnością lub efektywnością w systemach opartych na motolotniach, maszynach lub procesach?
Wspieram w analizie, modelowaniu, symulacji, sterowaniu, planowaniu trajektorii i optymalizacji złożonych układów dynamicznych.
Przegląd zbioru danych
Globalne statystyki z 11 lat danych XC motoparalotniarstwa (2014–2024).
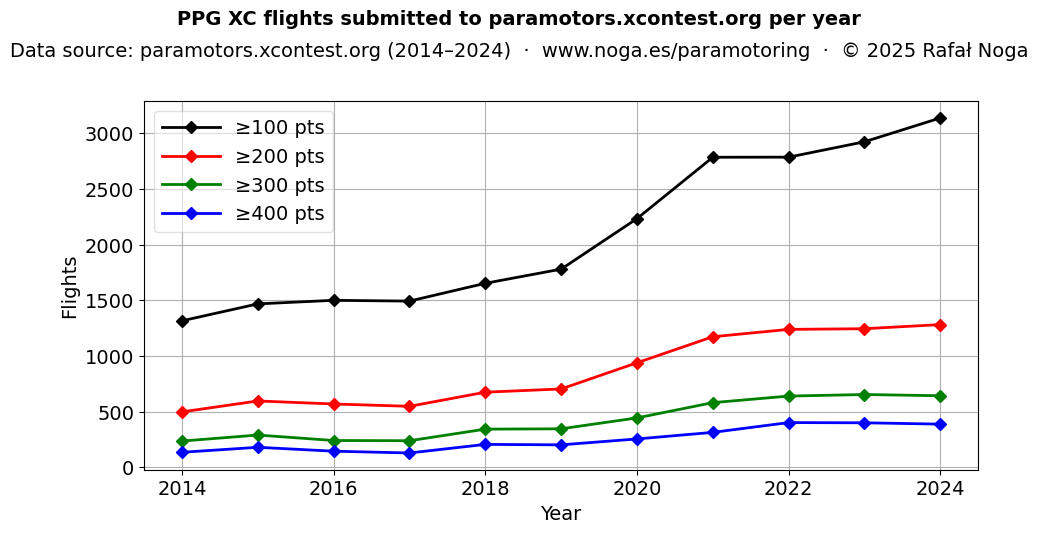
Loty na rok według progu punktowego
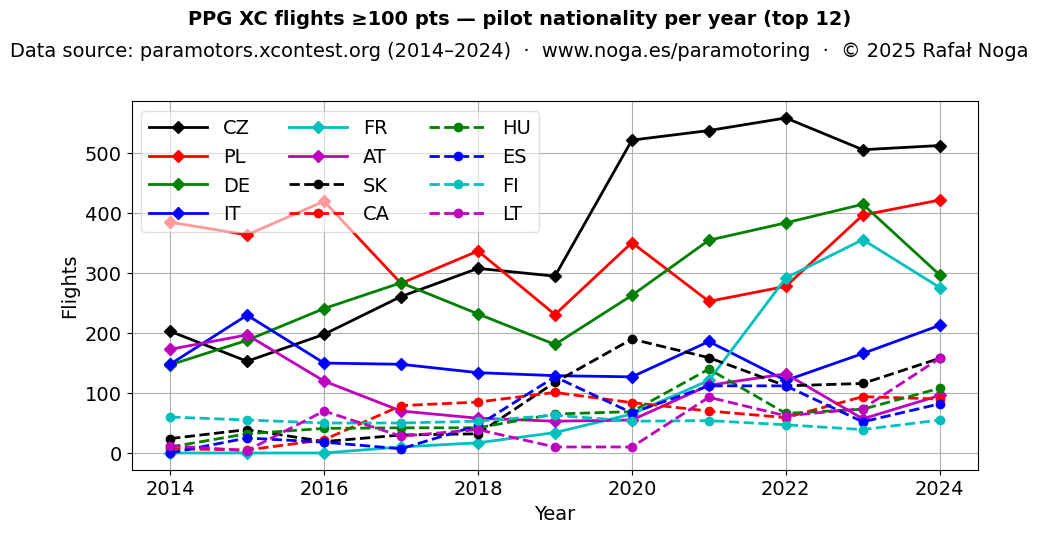
Narodowość pilotów na rok (Top 12)
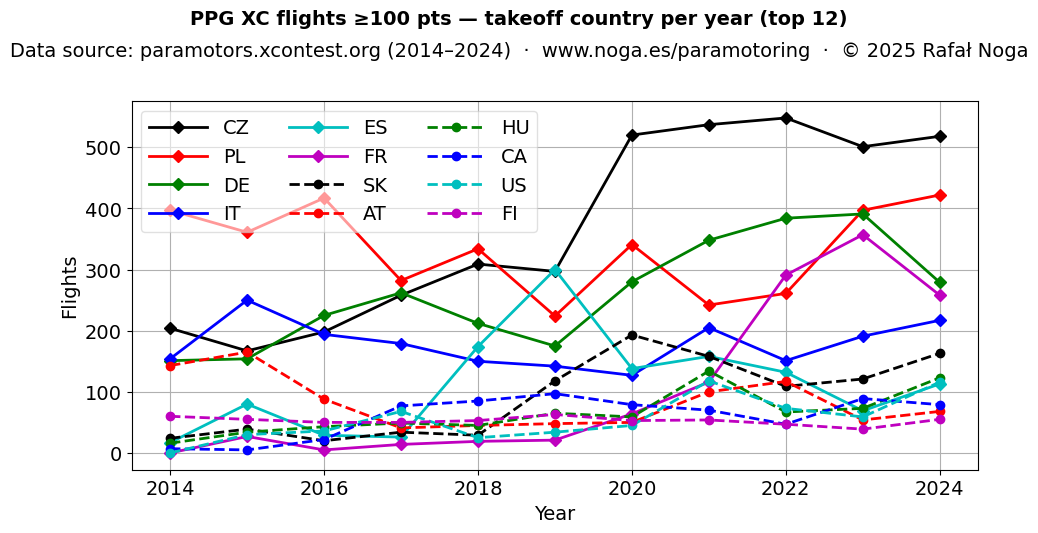
Kraj startu na rok (Top 12)
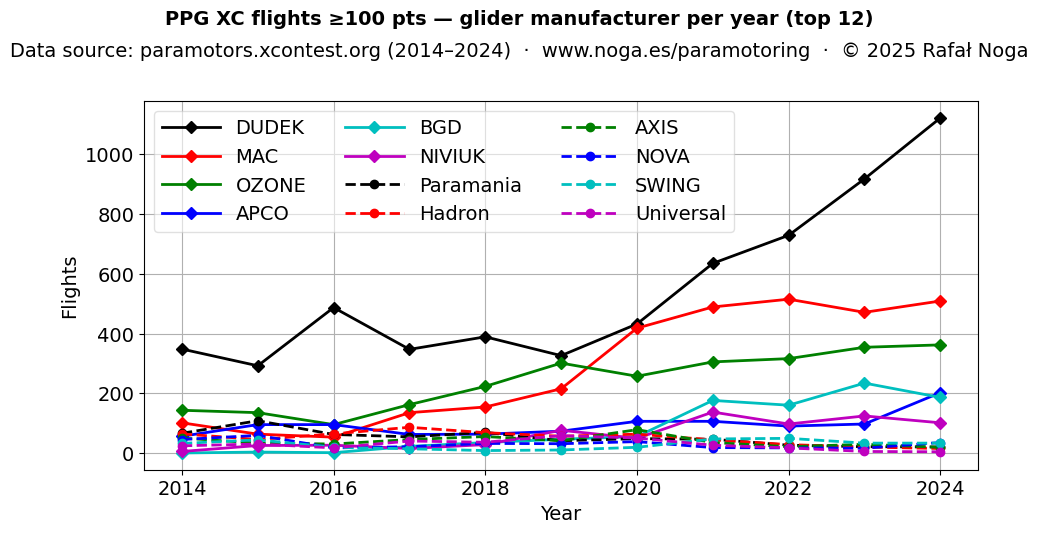
Producent skrzydła na rok (Top 12)
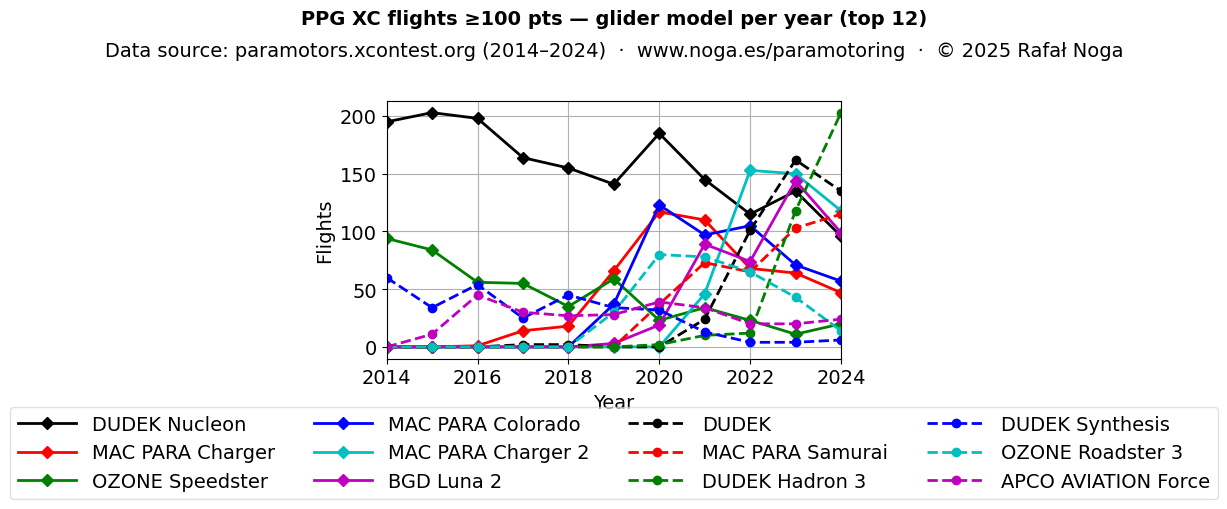
Model skrzydła na rok (Top 12)
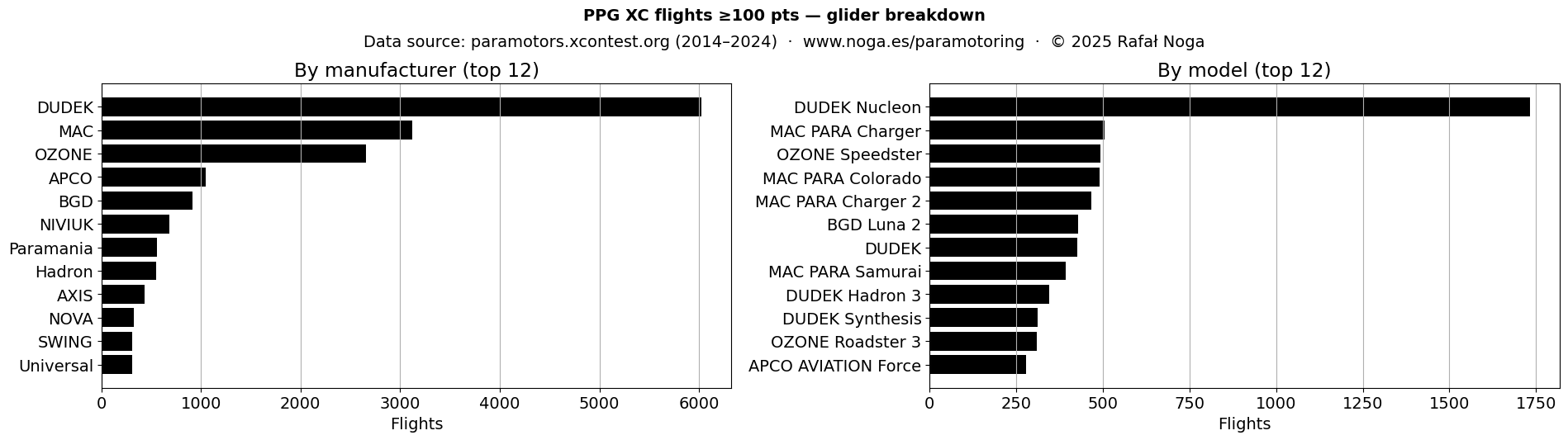
Zestawienie producentów i modeli skrzydeł
Interaktywna mapa startów
1 684 strefy startowe z co najmniej 2 lotami PPG XC ≥ 100 pkt (2014–2024). Kliknij marker, aby zobaczyć wszystkie loty z danego miejsca. Odcień szarości = śr. lotów/rok; wielkość koła = śr. pkt XC; wielkość pierścienia = maks. pkt XC.
Dane: paramotors.xcontest.org · 2014–2024 · Loty ≥ 100 pkt XC · Klastry 2 km+4 km dwuprzeb. · ≥ 2 loty
Współrzędne generowane automatycznie, bez indywidualnej weryfikacji. Lokalizacja może być przybliżona. Potwierdź przed wizytą. Bez gwarancji.
Znasz miejsce startowe, którego nie ma na mapie? Podziel się szczegółami.
Pobierz dane startowisk
Wkrótce…
Otrzymuj powiadomienia o nowych analizach i danych PPG.
Bez spamu. Wypisz się w każdej chwili.
Zbudowane przez inżyniera
Ta mapa powstała w Pythonie, z wykorzystaniem inżynierii danych & automatyzacji — tych samych umiejętności, które stosuję w przemysłowym sterowaniu procesami.
Analiza danych XC paralotniarstwa
Interesujesz się też paralotniarswem bez silnika? Odkryj, gdzie i kiedy piloci latają XC — analiza 11 lat danych XContest pokazująca najlepsze miejsca startowe według kraju i sezonu.
Analiza XC paralotnia →Pozostańmy w kontakcie
Grupa na Telegramie
Dołącz do grupy PPG XC Data Analysis na Telegramie — dyskutuj o danych lotów, trasach i miejscach startowych z innymi paralotniarzami z silnikiem.
Dołącz na TelegramieWesprzyj projekt
Podoba Ci się mapa? Pomóż utrzymać ją aktualną małą wpłatą.
Bądź na bieżąco
Otrzymuj powiadomienia o nowych analizach i danych PPG.
Współpraca
Reklama
Ta strona dociera do pilotów motoparalotniarstwa na całym świecie. Możemy współpracować w następujący sposób:
- Reklama: Baner lub sponsorowany wpis dla Twojej szkoły parametrowej, sklepu ze sprzętem lub usług szkoleniowych.
- Partnerstwa afiliacyjne: Polecam paramotory, czasze, wariometry — ustawmy linki afiliacyjne do Twojego sklepu.
- Sponsorowane raporty danych: Zamów szczegółową analizę PPG XC dla swojego regionu lub kraju.
- Katalog szkół latania & przewodników: Uzyskaj premium wpis obok danych startowych Twojego kraju.
- Sponsoring newslettera: Dotrzyj bezpośrednio do subskrybentów ze sponsorowanym miejscem.
Zainteresowany? Skontaktuj się
Usługi inżynierskie
Poza danymi PPG jestem niezależnym inżynierem specjalizującym się w systemach opartych na skrzydłach paralotniowych — w tym motorowych. Dawniej w SkySails (Airborne Wind Energy). Oferuję:
- Analiza danych & wizualizacja: Niestandardowe analizy statystyczne z danych lotów lub czujników.
- Modelowanie & symulacja: Modele dynamiczne dla systemów aerodynamicznych i energetycznych.
- Systemy sterowania & MPC: Zaawansowane sterowanie procesami i projektowanie regulatorów opartych na optymalizacji.
- Optymalizacja trajektorii: Optymalne trasy lotu i planowanie z uwzględnieniem ograniczeń.
- Fuzja sensorów & estymacja stanu: EKF/UKF, projektowanie obserwatorów do estymacji w czasie rzeczywistym.
Więcej na noga.es
Kontakt
Masz pytania lub sugestie?
Brakuje startu lub widzisz błąd? Skontaktuj się.